
Hey, guys welcome back to Techatronic. Today we will go to upload a very interesting and new project. Edge detection Arduino robot is a very popular project on the internet nowadays. If you want to make that robot on your own you have to just follow the instructions. We have given all the required steps and details over there. We share the code, circuit, and making instructions. If you really want to make this awesome bot you need a basic overview of Arduino, programming, and some basic electronics. We already uploaded a very brief tutorial on Arduino and other electronics. So, if you really want to learn the concepts you can read the other article also you can bookmark our website. So, now let’s get started without any delay.

Introduction:-
Edge avoiding robot is a kind of very simple robot that simply detect the edges by some sensor. Do you guys have any idea about the sensor which sensor we are going to use in this robot? So, this is the IR sensor. As we have discussed before the IR sensor and its Interfacing with Arduino. We will connect the IR sensor with the Arduino and the Motor driver which will operate the motor. If you have any problem with the IR sensor interfacing with the Arduino you can our existing article on that. Also, we have shared the Interfacing of Motor with Arduino with the motor driver.
What is edge avoiding robot?
The edge-avoiding smart robot works like when any sensor detects the edge the robot will turn according to the sensor direction. It means if the right side sensor comes near the edge then the Arduino robot will make a turn in the opposite direction which is the left side 7 vice-versa. Otherwise, if there is no edge the robot will move forward continuously, and there is no instruction for backward moving direction. Can you guess the application of this robot?
We have made this robot for fun and learning purposes only. Also. you can learn a lot of things from this robot such as programming, connection, and Sensor working. The main purpose to make this robot is to learn the working and basic concepts. So, if you want to learn more you can see a lot of articles and projects on our website homepage.
Edge detection Arduino robot Working
Working with this edge detection robot is very simple. there is some sensor we are using in this robot that senses the edge. and transfer this information to the microcontroller which is working as a brain in this Arduino robot this microcontroller will decide what will be the next step according to the inputs from the sensor. Basically, we are using the IR sensors in this robot. two IR sensors we are using in this edge detection robot. front two corners select for the sensor location and the attach the sensor in the downward direction the face of the sensor is downward so that the sensor can sense the edge before the robot. so that theh robot never fall. if there is edge at any sensor the robot will turn accordingly.
The motor associated with the sensor like if there is an edge at the left sensor then the robot will move a little back and move in left or right in any direction. that can be avoid the edge and arduino robot never fall down. this is the way the robot will work to avoid the edges. that’s why it is known as the edge avoiding robot. Now, if you know the workng of the robot you can easily make the robot.
Now, we will discuss about how to do the construction of this robot. so, the first step is the requirement.
Components Required for edge avoiding robot.
| Arduino Uno | BUY LINK |
| IR sensor | BUY LINK |
| BO Motors | BUY LINK |
| Wheels | BUY LINK |
| Chassis | BUY LINK |
| Jumper wires | BUY LINK |
| 12v battery | BUY LINK |
| UNO Cable | BUY LINK |
you can buy all components together-BUY LINK
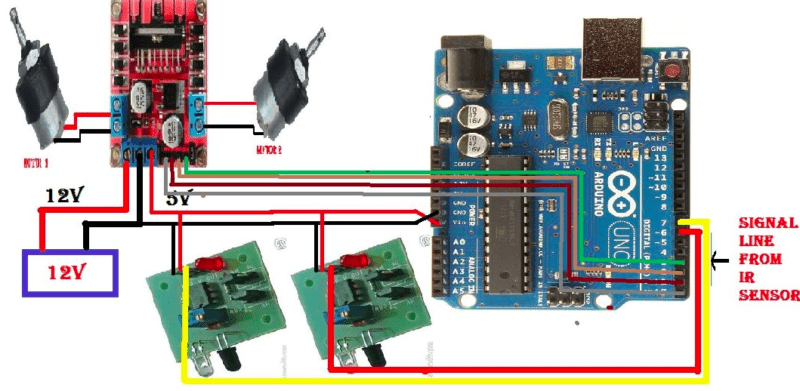
Edge avoiding robot Circuit diagram
Edge avoiding robot Code
The code for this robot is very simple here only we are reading two sensors at the digital input pins. and according to this data, we code the motors of the Arduino robot. like if the left sensor gets different values then it means there are edges and the robot motors should rotate in another direction. let’s discuss more the working of this robot.
void setup() {
//left sensor output to arduno input
pinMode(7,INPUT);
//Right Sensor output to arduino input
pinMode(6,INPUT);
//output from audrino to motor drive
//Right motor audrino to motor Drive
pinMode(0,OUTPUT);
pinMode(1,OUTPUT);
//left Motor Arduino motor Drive
pinMode(2,OUTPUT);
pinMode(3,OUTPUT);
}
void loop() {
//left sensor input
int l1=digitalRead(7);
//Right Sensor Input
int r1=digitalRead(6);
if((l1==HIGH)&&(r1==HIGH))
{
//Stay still
digitalWrite(0,LOW);
digitalWrite(1,LOW);
digitalWrite(2,LOW);
digitalWrite(3,LOW);
} else if((l1==LOW)&&(r1==HIGH)) {
//turns right
digitalWrite(0,HIGH);
digitalWrite(1,LOW);
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
} else if((l1==HIGH)&&(r1==LOW)) {
//turns left
digitalWrite(0,LOW);
digitalWrite(1,HIGH);
digitalWrite(2,HIGH);
digitalWrite(3,LOW);
} else if((l1==LOW)&&(r1==LOW)) {
//Stop the Boot
digitalWrite(0,LOW);
digitalWrite(1,HIGH);
digitalWrite(2,LOW);
digitalWrite(3,HIGH);
}
}Working of Edge avoiding Robot
the working of this robot is very simple it simply detects the edges and avoids them. so, the robot can automatically balance itself and not fall down from any table or surface which can avoid damage. if there is an edge where the robot can fall then from there the robot will. there are two sensors we are using one sensor at each front corner. the same sensor we have used in many other Arduino robots like a human following robot if the robot will move in a forwarding direction then both sensors will work. and if any of the sensors find the edge then it will move according to the direction.
So, there are we are using two IR sensors. which sense the edges of both the sensors attached facing down the ground. so they can easily find the edge in the edge-avoiding robot. Ir sensors transmit the infrared light and also received the same. so in this case the IR sensor transmits the light and also received the same.
Arduino Top 5 Robot
SPY Robot Using Arduino With Bluetooth Controls | Arduino robot
Human Following Robot Using Arduino | Best Arduino Robot
line following robot Arduino Tutorial
How to Make Self balancing Robot
Obstacle Avoiding robot using Arduino
Happy Learning!